* First draft * Add docs * Clean up code * Convert model * Add image processor * Convert Zoe_K * More improvements * Improve variable names and docstrings * Improve variable names * Improve variable names * Replace nn.sequential * More improvements * Convert ZoeD_NK * Fix most tests * Verify pixel values * Verify pixel values * Add squeeze * Update beit to support arbitrary window sizes * Improve image processor * Improve docstring * Improve beit * Improve model outputs * Add figure * Fix beit * Update checkpoint * Fix repo id * Add _keys_to_ignore_on_load_unexpected * More improvements * Address comments * Address comments * Address comments * Address comments * Rename variable name * Add backbone_hidden_size * Vectorize * Vectorize more * Address comments * Clarify docstring * Remove backbone_hidden_size * Fix image processor * Remove print statements * Remove print statement * Add integration test * Address comments * Address comments * Address comments * Address comments * Add requires_backends * Clean up * Simplify conversion script * Simplify more * Simplify more * Simplify more * Clean up * Make sure beit is loaded correctly * Address comment * Address bin_configurations * Use bin_configurations * Convert models, add integration tests * Fix doc test * Address comments * Unify regressor classes * Clarify arguments * Improve resize_image * Add num_relative_features * Address comment * [run-slow]beit,data2vec,zoedepth * [run-slow]beit,data2vec,zoedepth * Address comments * Address comment * Address comment * Replace nn.TransformerEncoderLayer and nn.TransformerEncoder * Replace nn.MultiheadAttention * Add attributes for patch transformer to config * Add tests for ensure_multiple_of * Update organization * Add tests * [run-slow] beit data2vec * Update ruff * [run-slow] beit data2vec * Add comment * Improve docstrings, add test * Fix interpolate_pos_encoding * Fix slow tests * Add docstring * Update src/transformers/models/zoedepth/image_processing_zoedepth.py Co-authored-by: amyeroberts <22614925+amyeroberts@users.noreply.github.com> * Update src/transformers/models/zoedepth/image_processing_zoedepth.py Co-authored-by: amyeroberts <22614925+amyeroberts@users.noreply.github.com> * Improve tests and docstrings * Use run_common_tests * Improve docstrings * Improve docstrings * Improve tests * Improve tests * Remove print statements --------- Co-authored-by: amyeroberts <22614925+amyeroberts@users.noreply.github.com>
5.5 KiB
ZoeDepth
Overview
The ZoeDepth model was proposed in ZoeDepth: Zero-shot Transfer by Combining Relative and Metric Depth by Shariq Farooq Bhat, Reiner Birkl, Diana Wofk, Peter Wonka, Matthias Müller. ZoeDepth extends the DPT framework for metric (also called absolute) depth estimation. ZoeDepth is pre-trained on 12 datasets using relative depth and fine-tuned on two domains (NYU and KITTI) using metric depth. A lightweight head is used with a novel bin adjustment design called metric bins module for each domain. During inference, each input image is automatically routed to the appropriate head using a latent classifier.
The abstract from the paper is the following:
This paper tackles the problem of depth estimation from a single image. Existing work either focuses on generalization performance disregarding metric scale, i.e. relative depth estimation, or state-of-the-art results on specific datasets, i.e. metric depth estimation. We propose the first approach that combines both worlds, leading to a model with excellent generalization performance while maintaining metric scale. Our flagship model, ZoeD-M12-NK, is pre-trained on 12 datasets using relative depth and fine-tuned on two datasets using metric depth. We use a lightweight head with a novel bin adjustment design called metric bins module for each domain. During inference, each input image is automatically routed to the appropriate head using a latent classifier. Our framework admits multiple configurations depending on the datasets used for relative depth pre-training and metric fine-tuning. Without pre-training, we can already significantly improve the state of the art (SOTA) on the NYU Depth v2 indoor dataset. Pre-training on twelve datasets and fine-tuning on the NYU Depth v2 indoor dataset, we can further improve SOTA for a total of 21% in terms of relative absolute error (REL). Finally, ZoeD-M12-NK is the first model that can jointly train on multiple datasets (NYU Depth v2 and KITTI) without a significant drop in performance and achieve unprecedented zero-shot generalization performance to eight unseen datasets from both indoor and outdoor domains.
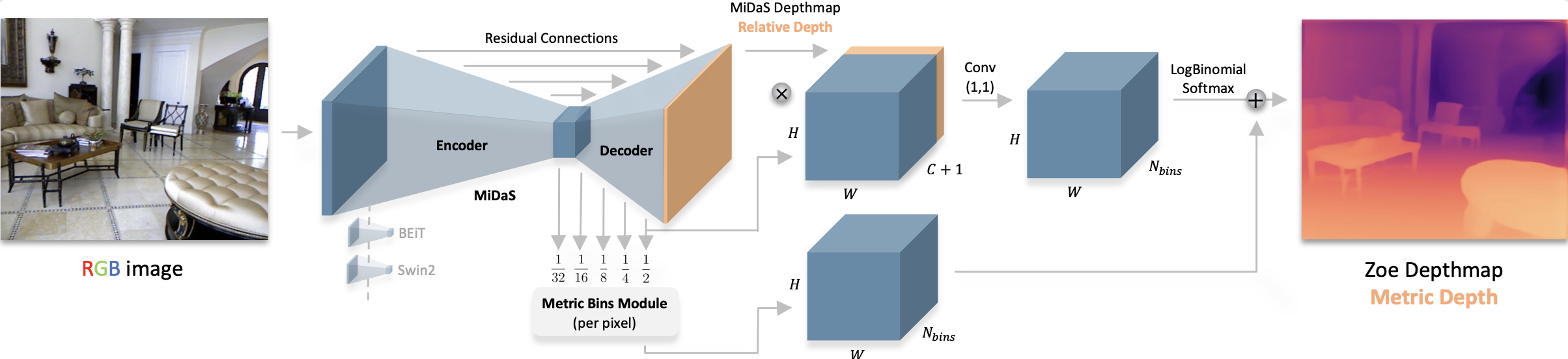
ZoeDepth architecture. Taken from the original paper.
This model was contributed by nielsr. The original code can be found here.
Usage tips
- ZoeDepth is an absolute (also called metric) depth estimation model, unlike DPT which is a relative depth estimation model. This means that ZoeDepth is able to estimate depth in metric units like meters.
The easiest to perform inference with ZoeDepth is by leveraging the pipeline API:
from transformers import pipeline
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
pipe = pipeline(task="depth-estimation", model="Intel/zoedepth-nyu-kitti")
result = pipe(image)
depth = result["depth"]
Alternatively, one can also perform inference using the classes:
from transformers import AutoImageProcessor, ZoeDepthForDepthEstimation
import torch
import numpy as np
from PIL import Image
import requests
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
image = Image.open(requests.get(url, stream=True).raw)
image_processor = AutoImageProcessor.from_pretrained("Intel/zoedepth-nyu-kitti")
model = ZoeDepthForDepthEstimation.from_pretrained("Intel/zoedepth-nyu-kitti")
# prepare image for the model
inputs = image_processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
predicted_depth = outputs.predicted_depth
# interpolate to original size
prediction = torch.nn.functional.interpolate(
predicted_depth.unsqueeze(1),
size=image.size[::-1],
mode="bicubic",
align_corners=False,
)
# visualize the prediction
output = prediction.squeeze().cpu().numpy()
formatted = (output * 255 / np.max(output)).astype("uint8")
depth = Image.fromarray(formatted)
Resources
A list of official Hugging Face and community (indicated by 🌎) resources to help you get started with ZoeDepth.
- A demo notebook regarding inference with ZoeDepth models can be found here. 🌎
ZoeDepthConfig
autodoc ZoeDepthConfig
ZoeDepthImageProcessor
autodoc ZoeDepthImageProcessor - preprocess
ZoeDepthForDepthEstimation
autodoc ZoeDepthForDepthEstimation - forward